Abstract
This study was conducted for the development of unmanned autonomous work speed sprayer(SS) and aims to develop path recognition technology for autonomous driving in orchard. The working path in the orchard is consistent with the direction in which the fruit column proceeds to the movable road between the fruit columns, and the path is recognized using the image in the front face of the driving direction. The video contains various kinds of backgrounds such as driving route, fruit trees, and outside the sky, and the direction of progress was predicted after separating the driving path in the image for route recognition. For recognition of driving, the image model was converted from RGB to HSV and a V channel with value information was used. To recognize the roadway, blurring and edge detection were used to create the runway and fruit heat separation boundary curves and the major boundary lines were determined using pixels and Hough transformations of the boundary curves. After separation into driving, the direction of progress was determined by creating the point and end of the path using the left and right boundary lines used for the separation. Although the performance evaluation results showed that the paths in the frontal images were recognizable and predictable, it was determined that learning-based route detection using strong and diverse posture and image data that could be adapted in the environment would be necessary for field application and SS equipment installation.
Figures & Tables
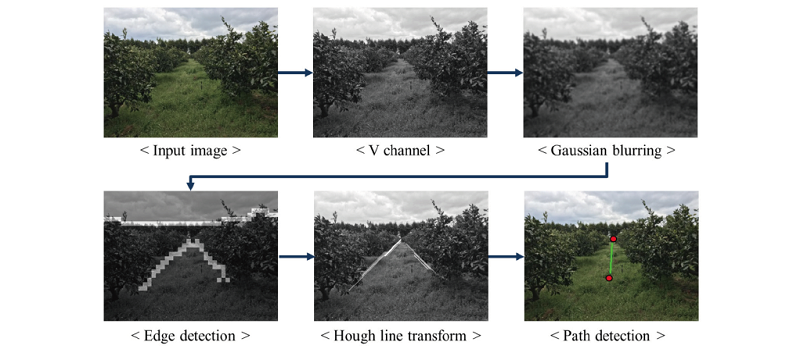
Fig. 1. Overall process for path detection in orchard scenes.

