Introduction
트랙터는 주요 농업기계 중 28.4%의 보급률을 차지하고 있으며(KAMICO and KSAM, 2019), 주요 농업 동력원으로 쟁기, 파종, 수확, 운송과 같은 농업 활동에서 중요한 역할을 한다. 글로벌 농업기계화가 본격화되면서 무인운전, 동력 변속기, 상시 변속기, 농업의 사물인터넷(IoT), 실내진동 저감 등 첨단 트랙터 기술의 등장과 함께 트랙터 인구가 비약적으로 증가하여 농업 생산성을 높이고 있다. 그러나 높은 지상고, 다양한 필드 조건에서의 작동, 높은 변동 부하가 발생하는 트랙터의 특징으로 인해 전도 위험성이 크다. 전복 사고는 트랙터로 인한 사망의 절반 이상으로 나타난다고 보고되었다(Abubakar et al., 2010). 따라서 트랙터의 전도 안정성은 장기적으로 해결해야 할 주제가 되었다.
트랙터 전복은 1950년대부터 많은 관심을 받아왔다. 널리 받아들여지고 있는 차량 전복 방지 솔루션은 1956년에 발명된 ROPS (Rollover protective structure)이며, 이후 일련의 산업 및 국제 표준이 정립되었다(Gonzalez et al., 2016). 정적, 준정적 및 동적 모델링에 대한 선구적인 연구는 차량 동적 거동의 기본 원리를 형성하는 데 전념하고 있다(Ando and Fujimoto, 2011). 농지의 굴곡은 트랙터의 필드 작업 중 차량 자세에 영향을 미친다. 관련 연구에 따르면 농업이 분할된 구릉 및 산악 지역(예: 스웨덴, 핀란드, 이탈리아 및 뉴질랜드)보다는 주로 광활한 평야 지역(예: 호주, 미국, 캐나다)에 의존하는 국가에서 트랙터 전복으로 인한 사망률이 분명히 낮은 것으로 보고되었다(Ayers and Korsandi, 2017).
경사면에서의 트랙터 전복은 ROPS에도 불구하고 트랙터 사고 사망의 중요한 원인이며, 이는 ROPS에 대한 설계 표준이 부적절할 수 있음을 시사한다. 게다가, ROPS는 사고를 예방하는데 도움이 되지 않으며, 심각한 부상의 가능성을 감소시킬 뿐이다. 트랙터는 많은 산업화 국가에서 농업 작업 관련 사망자의 주요 원인으로 인식되고 있으며, 트랙터 전복만으로도 트랙터 사망자의 50% 이상을 차지한다(Molari et al., 2019; Rondelli et al., 2018; Pessina et al., 2016; Mayrhofer et al., 2014; Jawa et al., 2013).
농작업기를 연결하고 작업이 가능한 농업용 트랙터의 안정성은 농업기계 엔지니어들에게 중요한 연구 영역으로 농작업 용이성과 운전자의 안전을 강화하기 위한 것이다. 본 논문은 안정성을 개선하는 방법에 대한 통찰력을 얻기 위해 트랙터 무게중심과 안정성 분석 방법에 대한 문헌 검토를 제공한다.
Stability
트랙터 전복 사고는 농업에서 여전히 심각한 문제이며 안전과 경제적인 이유로 그 수를 줄여야 한다. 지난 몇 년 동안 설계자와 연구자들은 농업용 트랙터의 안정성 문제에 대해 상당한 양의 연구를 수행했다(Majdan et al., 2021; Ahmadi, 2013; Gravalos et al., 2011). 전복은 트랙터가 움직이는 동안의 주요 문제로 안정성의 손실은 트랙터가 주행 방향을 벗어나는 것을 뜻한다. 이는 트랙터의 주행 경로 이탈, 전복 및 충돌로 이어질 수 있다. 이러한 문제는 트랙터의 COG (Center of gravity)와 연관하여 도로 주행 시 과도한 속도와 코너링으로 인해 발생할 수 있으며, 농작업시 필드 지형과 부착 작업기의 영향으로 인해 발생할 수 있다.
Ahmadi (2013)는 불규칙한 경사진 지반에서 작동하는 트랙터의 다양한 기하학적 구조와 질량 사양이 기계의 측면 안정성에 미치는 영향을 조사하기 위해 동적 모델을 개발하였다. 제안된 모델에서 전복 및 미끌림 불안정성이 연구되었고 트랙터 안정성 지수가 공식화되었다. 모델의 매개 변수를 사용한 수정된 Excel 스프레드시트 패키지를 사용하여 TSI (Tractor stability indexes)를 결정했다. 마지막으로 모델의 매개 변수 변동이 TSI에 미치는 영향을 평가하였다. 분석 결과에 따르면 지반경사(7.5°~42.5°)의 변화가 TSI에 미치는 영향과 관련하여 유사한 경향이 관찰되었다(Fig.1). 더욱이 TSIoverturn에 대한 트랙터 휠 트랙 폭과 COG 높이의 영향이 안정성 지수에 대한 트랙터 휠 베이스의 영향보다 더 컸다. 따라서 트랙터의 전복되지 않도록 안정시키기 위해서는 트랙터의 COG를 낮추고 트랙터의 휠 트랙 폭의 증가가 유의한 것으로 나타났다.
Bietresato and Mazzetto (2018)는 실제 테스트의 한계를 극복하고 트랙터의 제조사 및 사용자에게 보다 높은 수준의 정보를 제공하는 것을 목표로 연구실 내에 설치되는 테스트 장비인 틸터블 플랫폼을 구상했다. 틸팅이 가능한 기울일 수 있는 플랫폼은 다양한 지면 기울기를 재현할 수 있는 넓은 평면 구조(15×15 m)로, 제어되고 안전한 환경에서 차량이 원형 경로를 따라 이동을 할 수 있다. 또한, 최대 경사진 방향으로 횡단하는 폭의 절반에서 각도를 생성할 수 있다. 플랫폼 내에는 원형의 턴테이블이 사분면으로 분할되어 위치해있다. 각각의 테이블은 움직이지 않는 차량의 중량을 측정할 수 있다. 틸팅 구조상에 설치되어 수직축을 중심으로 회전할 수 있기 때문에 차량의 세로축의 각도 위치를 변경할 수 있다(Fig. 2). 이 실험 방법은 농업기계의 안정성을 인증하는 새로운 실험 방법을 개발하는데 이용 가능할 것이다.
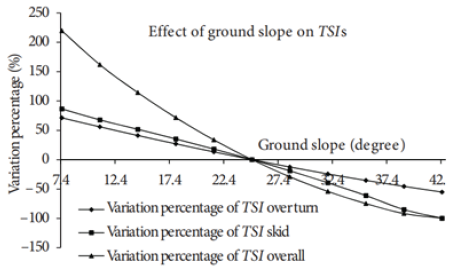
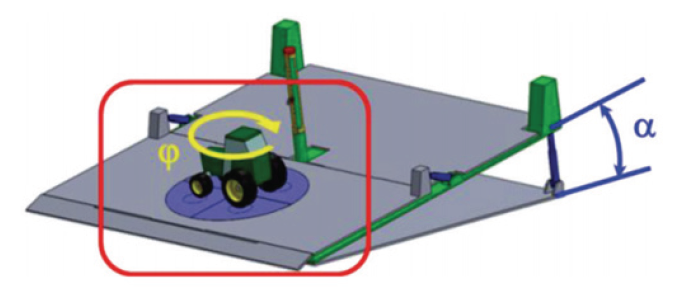
Fig. 2. Static tests use only the turntable inserted in the lower half-platform; the same picture evidences the angles which characterize the spatial position of the machine under test, α: global inclination of the support plane, φ: angle between the vehicle’s longitudinal plane and the maximum slope direction (Bietresato and Mazzetto, 2018).
Yaw stability
Yaw 불안정성은 트랙터가 포장도로에서 고속주행 할 때와 과도한 속도로 커브 주행 시 발생할 수 있다. 또한, 다양한 비포장 된 도로와 농경지에서 직선 궤적에서 주행하는 동안에도 발생할 수 있다.
Pearson and Bevly (2007)은 설계 적용 및 새로운 자동 조향 제어 시스템에 대한 트랙터 핸들링 특성의 영향을 이해하는 데 사용할 수 있는 히치형 작업기가 있는 트랙터에 대한 yaw 동적 모델을 개발했다. 선형 타이어 모델은 기구에 의해 생성된 히치력을 모델링하는 데 사용할 수 있으며 히치 동력계의 실험 데이터를 사용하여 검증되었다. 실험 데이터의 분석은 기구의 측면 히치력 대 슬립 각도가 상대적으로 선형이며 선형 타이어 모델로 나타낼 수 있음을 보여주었다. 이 모델은 구현력을 설명하기 위해 추가 바퀴(승용차의 횡방향 역학을 포착하는 데 사용되는 기존 자전거 모델에서)를 사용하기 때문에 “3륜” 자전거 모델이라고 한다. 이 모델은 차량의 내부와 외부 사이의 차등 종방향 또는 드래프트 힘을 무시하므로 횡력의 영향만 포함했다. 3차원 힘 동력계를 사용하여 히치 모델을 검증하기 위한 실험을 수행했다. 이 데이터는 도구의 힘이 실제로 횡방향 속도에 비례하며 차동 드래프트 힘이 “3륜” 자전거 모델에서 파생된 것처럼 무시될 수 있음을 보여준다. 정상 상태 및 동적 조향 데이터는 히치 하중의 변동을 정량화하기 위해 다양한 깊이와 속도에서 기구에 사용되었다. 동적 데이터는 “3륜” 자전거 모델에 사용된 계수를 결정하기 위해 도구 및 깊이의 경험적 전달 함수 추정값(ETFE)을 형성하는 데 사용되었다. 히치 코너링 강성이라고 하는 단일 매개변수의 변경은 다양한 기계 구성을 포착할 수 있었다. 마지막으로 전륜구동력을 포함하는 모델이 도출되었다. 4륜 구동 견인력의 효과에 대한 예비 조사를 제공하고 2륜 구동과 4륜 구동의 차이점을 연결 장치가 있는 트랙터의 yaw 역학에서 보여주는 실험이 수행되었다.
이 논문은 히치 장착 기계가 있는 트랙터의 yaw 역학에 대한 기본 연구를 제시했으며, yaw 역학에 대한 전륜 구동력의 영향을 보여주었다. 그러나 지반 수분, 유형 및 다짐과 같은 다양한 지반 조건에 대해서는 깊이 연구되지 않았다. 다른 매개변수 및 지형 조건은 실제로 기계가 생성하는 yaw 안정성에 영향을 미칠 수 있다.
Lateral stability
트랙터 장치의 측면 안정성 각도를 결정하는 주요 방법으로 수평면에 대해 다양한 각도로 기울어진 플랫폼이 있는 고정 테스트 벤치의 사용을 기반으로 하는 시험이 있다. 실제 트랙터와 부착기의 측면 안정성을 정확하게 측정할 수 있기에 많이 사용되어지고 있다(Kireev et al., 2019; Choi et al., 2017; Gravalos et al., 2011).
일반적으로 수행되는 트랙터 안정성 실험은 실제 상황에서는 적용성이 떨어진다. 일반적인 방법은 두 개의 정적 구성에서 만 측면 방향 뒤집힘 각도를 점검할 뿐이다. 이는 대부분의 실제 상황을 다루지 않으며, 질량 중심을 측정하지 않는다. 따라서, 차량에 궁극적인 능동/수동 안전 시스템을 적용하기 어렵다(Bietresato and Mazzetto, 2018).
이 방법은 기울어지는 플랫폼과 이를 견인하는 장치의 제작이 필요하여 고가의 장비 제작을 필요로 하는 단점이 있다. 고가의 장비를 사용하지 않고 실험을 수행하는 방법으로는 계산방법을 적용하는 것이다. 이를 사용하면 모멘트 계산을 위한 방정식에 포함된 매개변수를 명확히 할 수 있다. 그러나 그 도움으로 프로세스의 역학, 차량의 공간계획, 서스펜션의 운동학, 서스펜션 및 트래블 리미터의 탄성 특성의 비선형성을 고려하는 것은 불가능하다. 따라서, 현재까지 차량의 안정성 평가는 덤프 플랫폼이 있는 스탠드에 대한 실제 실험에서만 안적정으로 수행이 가능하였다(Lysych, 2020).
Ahmadi (2011)는 위치 교란 발생 시 트랙터의 횡방향 안정성에 미치는 전진 속도, 지반 경사 및 차륜-지반 마찰 계수의 영향을 조사하기 위해 트랙터 동적 모델을 개발하였다. 이 모델에서는 전복과 미끄러짐으로 인한 불안정성과 각 경우에 대한 안정성 지수가 결정되는 두 가지 유형의 불안정성이 고려되었다. 모델을 검토하기 위해 트랙터 MITSUBISHI-2501D의 다양한 기하학적 구조와 질량 사양을 사용했다. 이 모델의 결과에 따르면 전진 속도와 지면 경사는 모든 안정성 지표에 역효과를 미쳤다. 게다가 이 트랙터의 안정성은 전복보다는 트랙터 미끄러짐의 영향을 더 많이 받았다. 따라서 트랙터의 전반적인 안정성을 개선하기 위해서는 트랙터의 미끌림 역학에서 도출된 트랙터 안정성 지수를 높이는 것이 우선되어야 한다.
Lysych (2020)는 다물체 동역학 방법으로 트랙터의 정적 측면 안정성을 평가 하였다. 시뮬레이션 모델을 생성하기 위해 CAD SolidWorks 및 CAE SolidWorks Motion의 가상 모델링 방법을 사용했다. MTZ-82.1 트랙터의 3D 모델이 만들어졌으며, 전면 및 후면에 장착된 3점 연결 장치가 장착되었다. 동시에 모든 기본 구조 요소와 기하학적 및 질량 관성 매개변수가 보존되었다. 트랙터는 전면 및 후면에 장착된 모듈식 기계로 통합되었다. 측면 안정성을 연구하기 위해 트랙터는 고정 베이스와 경사각을 변경하는 플랫폼으로 구성된 가상 스탠드에 장착되었다. 가상 스탠드를 사용하여 기계-트랙터 장치와 부착물이 없는 트랙터의 세 가지 일반적인 구성의 측면 안정성 각도를 얻었다. 부착물이 없는 트랙터의 경우 전복 각도는 34°이고 단일 빔 후방 장착 기계가 36°, 이중 빔 후방 장착 기계가 25°, 전방 장착 기계 및 이중 빔 후방 장착 기계는 36°였다. 시뮬레이션 데이터의 검증은 각도가 조절되는 시험장치에서 얻은 데이터와 비교하여 수행되었다. 시험장치에서 트랙터를 전복시키는 방법과 해석 모델의 결과로 얻은 트랙터의 측면 안정성 임계 각도 값의 차이는 3 ~ 5°로 나타났다.
각도가 조절되는 시험장치를 이용한 횡방향 정적 안정성 연구를 통해 트랙터의 모든 구성에 대한 안정성을 평가할 수 있었다. 이 경우 3D 모델의 질량 중심에 대한 정적 연구와 달리 트랙터의 경사각 변화로 인한 질량 재분배가 서스펜션, 부착물, 바퀴 및 탄성 특성의 비선형성에서 고려되었다. 가로 방향으로 질량 중심이 크게 이동된 부착물을 설치하는 경우 각도 조절이 되는 시험장치에서 세로 안정성에 대한 연구는 고정된 것보다 신뢰할 수 있었다. 이는 장치의 세로 방향 전복과 동시에 측면 낙하로 인한 것이다. 향후에는 다양한 농작업기의 부착 형태와 지형에 따라서 이동할 때 트랙터의 시뮬레이션 모델을 사용하여 동적 안정성을 연구할 수 있을 것이다.
Rollover stability
트랙터의 용도가 천차만별인 것처럼 트랙터가 사용되는 환경도 천차만별이다. 트랙터는 종종 둑이 있고 울퉁불퉁하며 부드럽고 미끄러운 지면에서 사용된다. 이와 같은 어려운 지형은 트랙터 타이어와 지면 사이의 접착력이 저하되어 작업자의 제어력 상실과 트랙터의 횡방향 전복이 발생할 수 있다(Emam, 2012; Spencer and Crolla, 1978). 전복 사고는 동적 조건에서 정적 안정성의 한계에 도달하거나 제어 불능으로 미끄러지는 것으로부터 발생한다. 농업용 트랙터는 후방, 측면 및 전방의 3방향 중 어느 하나로 전복할 수 있다.
Capacc et al. (2021)은 현대식 트랙터 횡방향 전복의 복잡성을 더 잘 이해하기 위해, silent-blocks서스펜션ROPS이 있는 현대식 좁은 트랙용 트랙터에서 수행되는 제어된 횡방향 전복 실험 동안 ROPS에 흡수되는 에너지를 조사했다. 다른 트랙터를 만들고 ROPS와 에너지 분할에 영향을 미칠 것을 조사하기 위해서, 테스트에서 서로 다른 두 휠 구성으로 넓은 휠(오픈필드용)과 좁은 휠(과수원용), 그리고 타이어의 너비와 해당 트랙을 언급하고 수행했다. ROPS-ground 충돌 지점에 위치한 동적 로드 셀 및 변위 변환기는 ROPS 운전실 프레임에 의해 흡수된 에너지의 직접적인 측정이 가능하게 했다. 운전실 바닥에 대한 로드셀 궤적을 실시간으로 측정하기 위해 삼변측량법이 개발되어 탑재되었다. 좁은 타이어 구성은 일관되게 ROPS 캡 프레임에 넓은 타이어 구성보다 더 많은 에너지를 가했다. 횡방향 전복에서 ROPS 운전실 사일런트 블록의 영향을 더 잘 평가하기 위해 정적 및 동적 테스트를 수행했다. 결과는 타이어가 에너지 분할에 상당한 영향을 미치고 silent-blocks의 동적 성능에 대한 추가 이해가 필요하다는 것을 확인했다.
Hong et al. (2017)은 로더가 장착된 트랙터에 대해 정적 상태 수학적 시뮬레이션과 검증 실험을 통해 안정성 해석을 수행하여 새롭게 개발된 원형 베일러를 장착한 트랙터 베일러 시스템의 적용성을 평가하였다. 트랙터와 베일러의 무게중심을 계산하여 횡방향 전복을 분석하였다. 트랙터의 전복은 기존 연구에서 제시한 수학적 방정식을 적용하고 그 결과를 새로 개발된 수학적 시뮬레이션을 통해 얻은 결과와 비교하여 분석하였다. 로더가 장착된 트랙터의 경우 수학적 시뮬레이션 결과와 검증 실험의 실험값을 비교 검증하였다. 트랙터에 베일러를 부착한 후 시스템의 COG가 낮아지고, 동일한 기울기에서 처짐각이 0°와 180° 사이에서 증가 또는 감소함에 따라 시스템의 횡방향 전복 각도가 꾸준히 증가하거나 감소하였다. 선행 연구의 수학식을 적용하여 수행한 시뮬레이션 결과 경사각이 19.5° 이상이고 편향각의 범위가 반시계 방향으로 82°~262°일 때 우측 횡전복이 발생하였다. 또한, 왼쪽 횡전복도 최소 19.5°의 경사각에서 발생했으며 편향각의 범위는 반시계 방향으로 259°에서 79° 사이였다. 0° 처짐각 조건에서 로더가 장착된 트랙터의 시뮬레이션에서 횡방향 전복이 17.9°에서 발생하여 검증 실험(17.5°) 결과에서 2.3% 변화하였다. 시뮬레이션은 쉽게 측정할 수 없는 휠 반경과 힌지 포인트 높이를 제외한 개별 휠 지면 접촉점에 의해 형성되는 틸트각의 상관관계와 무게중심을 적용하여 수학방정식의 편리한 사용을 가능하게 하였다. 그 결과 좌우 횡전복이 모두 19.5°에서 발생한 것으로 나타났다.
적재 및 하역 장소 사이를 이동하는 동안 트랙터-프론트 엔드 로더 시스템은 종종 제동 프로세스를 거치는데, 특정 상황에서는 프론트 액슬을 중심으로 전복하여 종방향 안정성을 잃을 수 있다.
Arote et al. (2019)는 횡단 경사면에서 시스템을 구동하는 동안 다양한 로더 버킷 리프팅 높이를 기반으로 어려운 작업 조건을 고려하여 트랙터 프론트 엔드 로더 시스템의 측면 안정성을 평가하였다. 이 시스템의 전복은 과거 연구에서 제시된 수학 방정식을 적용하여 분석했으며, 25 HP의 3개 테스트 트랙터에 대해 새로 개발된 예측 모델과 비교했다. 엑셀 스프레드시트는 동적 조건에서 로더 버킷 높이 및 페이로드와 관련하여 가로 경사면의 TSI를 계산하는 데 사용되는 수학 방정식으로 구성되었다. 로더 버킷을 지면에 가깝게 내린 후 시스템의 무게 중심이 낮아지는 것이 관찰되었다. 이 시스템은 로더 버킷이 올라가고 트랙터가 횡경사각으로 움직이면 더 불안정한 것으로 나타났다. 실험 연구에서 트랙터-1, 트랙터-2 및 트랙터-3의 경우 가로 경사 15°, 버킷 리프트 높이 1 m, 탑재하중 100 kg의 TSI가 각각 0.3, 1.2, 1.3으로 확인되었다. 트랙터-1, 트랙터-2 및 트랙터-3의 경우 시스템이 작동 가능한 버킷 리프팅 높이와 가로 경사각은 각각 1 m와 15°, 1.2 m와 16°, 1.3 m와 17°였다. 또한, 로더 버킷을 최소 접지 위치로 낮추는 것은 횡경사에서의 전복을 크게 방지하는 데 도움이 되지 않는 것으로 관찰되었다. 따라서, 트랙터를 뒤집히지 않도록 안정화하는 것은 트랙터의 무게 중심을 낮추는 것과 동시에 트랙터의 휠 트랙 폭을 늘리는 것이라는 것이 연구에서 확인되었다. 또한, TSI를 0부터 4까지의 척도로 분류하기 위한 기준을 정의하였다. 여기서 < 0은 매우 낮음, 0 - 2는 낮음, 2 - 4는 양호, > 4는 우수이다.
Center of gravity position
트랙터의 COG 위치는 차량의 안정성을 결정한다(Baker and Guzzomi, 2013). 트랙터는 주행환경과 연결되는 작업기에 따라 광범위한 하중을 받으며, 트랙터의 중량 분포는 COG의 높이에 영향을 미치는 중요한 역할을 한다.
Hong et al. (2017)은 새롭게 개발된 3-축 트랙터-베일러 시스템의 적용 가능성을 평가하기 위해 무게중심을 통합하여 계산하였다. 트랙터의 무게 중심과 베일러의 무게 중심은 이전 연구의 식(1-4, 6)와 새로 수정된 식(5)를 결합하여 계산되었다. 트랙터의 무게중심(XT, YT, ZT)은 들어올렸을 때 앞바퀴의 높이(h)에 대한 틸트 각도(δ)와 들어올렸을 때 앞바퀴 하중(W(L/R)2f1)을 함께 사용하여 계산되었다(Fig. 3-(A)). 베일러의 무게중심(XB, YB, ZB)은 3점 히치 설치 높이와 하강 시 높이(h)에 의해 형성된 틸트 각도(α)를 하강 전후의 차체 하중(WBF, WBf1)과 연계하여 계산하였다(Fig. 3-(B)) 강체로 연결된 것으로 추정되는 트랙터-베일러 시스템의 무게 중심(CGS: XS, YS, ZS)은 트랙터와 베일러의 개별 무게 중심 좌표를 좌표 기준점(S2)로 변환하고 식(7-9)를 적용하여 결정했다(Hong et al., 2017).
XT = ((WR2+WL2)×L1)/WT (1)
YT = XT × cot δ − (WL2f1×(L1×cosδ+(r1−r1)×sinδ))/WT× sin δ (2)
ZT = (WR1×WL1+WL2×(W1+W2)/2+WR2×(W1+W2)/2)/WT (3)
XB = (WBf×L6)/WB (4)
YB = ((WR3−WL3)×(W3/2))/WB (5)
ZB = (WBf1×L6 − 1/WB×sinα) − XB× cot α (6)
XS = (WT×XT+WB×XB)/(WT+WB) (7)
YS = (WT×YT+WB×YB)/(WT+WB) (8)
ZS = (WT×ZT+WB×ZB)/(WT+WB) (9)
Where: WL1, WL2, WLL3, WR1, WR2, WR3 = The loads places on individual wheels
W1, W2, W3 = The lengths of individual axles, WT, WB, and WS are the loads of the tractor, baler, and system
W(L/F)1f, W(L/F)2f, W(L/F)3f, WBf = The loads placed on individual wheel ground contact points
W(L/F)1f1, WL/F)2f1 = The loads placed on individual wheel ground contact points when lifted up
W(L/F)3f1, WBf1 = The loads placed on the wheel and 3-point hitch when let down
L1 = The horizontal distance between the tractor front wheel and the center of the rear wheel,
L6, L6-1 = Horizontal distance and tilted horizontal distance from the baler’s rear wheel ground contact point to the hitch vertical line segment’s ground contact point
δ = The angle increase when the tractor was lifted up to a certain height (h)
α = The angle decrease when the baler was let down to a certain height(h)
Kim et al. (2016)은 농업용 트랙터의 무게중심 위치를 결정하는 방법을 개선하였다. 트랙터의 무게중심을 찾기 위해 두 선의 교차점을 찾는 알고리즘을 사용하였다. 제안하는 방법은 삼각함수와 좌표변환을 사용하였다. 데이터는 농업용 트랙터의 무게 중심에 대한 ISO 789-6 테스트 절차에 따라 측정되었다. 제안된 방법을 사용하여 계산된 높이는 AutoCAD 도면에서 결정된 높이와 비교되었다. 트랙터의 무게 중심을 찾기 위해 두 선의 교차점을 찾는 알고리즘이 사용되었다. 트랙터 무게중심을 구하는 과정에서 두 개의 선 좌표를 얻을 수 있으며(Fig. 4), 두 선의 교차점을 찾는 것은 식 (10)과 같이 정의되었다(Kim et al.. 2016).
 (10)
(10)
Where, (Xa, Ya), (Xb, Yb)= Selecting two points on Line A in raised position of front axle (rectangular coordinates)
(Xc, Yc), (Xd, Yd),) = Selecting two points on Line B in raised position of rear axle (rectangular coordinates)
 .
.
계산과 도면에서 얻은 수직 좌표는 동일하게 나타났다. 연구결과는 트랙터의 무게중심을 측정하고자 하는 사용자에게 불편하고 시간이 많이 걸리는 플로팅 방법 대신 개발된 방법을 적용할 수 있게 되었다. 또한, 사용자는 Microsoft Excel을 프로그래밍하여 수직 좌표를 쉽게 결정할 수 있다.
트랙터의 전복 안정성은 하중과 COG 높이에 의해 영향을 받는다. 동일한 무게의 경우, COG 높이가 증가하면 차량의 롤 안정성이 감소한다. 따라서 무게중심의 위치에 영향을 미치며 롤오버가 발생할 가능성이 더 높다(Shuwen and Siqi, 2014). 고속 선회 또는 고속주행 중에 횡방향 가속은 차량 COG에 큰 힘을 발생시킨다. 이러한 횡력이 타이어-로드 마찰력의 균형 효과를 초과하면, 차량 내부의 휠이 노면에서 들어 올려져 결국 전복되는 경향이 있다(Marimuthu et al., 2006). 트랙터의 전복은 높은 위치 COG 높이 때문에 차량의 과도한 조향에 의해 발생할 수 있다(Zhang et al., 2020; Yuan et al., 2012; Hussain et al., 2005). 노면에서 무게중심의 높이는 차량의 좌우 하중 전달에 영향을 미치며, 이는 타이어에서 횡력을 생성하는 능력에도 영향을 미친다(Sampson and Cebon, 2003).
전복의 시작을 나타내는 임계점은 무게가 바깥쪽 바퀴로 이동하여 안쪽 바퀴의 정상 힘이 0이 되도록 하는 것이다. 전복 결정에 사용되는 주요 측정 도구는 SRS (Static rollover stability)이며, 이는 트랙 폭과 COG 높이 사이의 관계이다. 따라서, COG 높이가 증가하면 차량 정적 안정성 계수가 영향을 받고 전복 안정성이 감소한다(Chrstos and Guenther, 1992; Hac, 2002).
정적 전복 임계값(Static rollover thresholds, SRT) 또는 정적 안정성 계수(Static stability factor, SSF)는 차량의 안정성을 결정하는 데 사용되는 가장 중요한 도구 중 하나이다(Huston and Kelly, 2014). 이는 차량의 COG 위치에 따라 크게 달라지며, 차량의 타이어 하나가 노면과 접촉하기 전의 최대 횡방향 가속도를 나타낸다(Hac, 2022; Sunday, 2021; Moreno et al., 2018).
Conclusion
본 논문은 도로와 운전자의 안전을 확보하기 위해 정적 및 동적 특성을 분석하기 위해 트랙터의 안정성 분석에 대한 문헌 고찰을 제시한다. 현재까지 차량의 안정성 평가는 덤프 플랫폼이 있는 스탠드에 대한 실제 실험에서만 안적정으로 수행이 가능하였다. 하지만 일반적으로 수행되는 트랙터 안정성 실험은 지반 수분, 유형 및 다짐과 같은 다양한 지반 조건에 대해서는 깊이 연구되지 않아 실제 상황에서는 적용성이 떨어진다. 이 논문은 트랙터의 안정성 검증 방법이 기울일 수 있는 플랫폼을 이용한 실차 위주의 시험방법에서 다양한 계산 방법을 통해 3D 모델을 통해 보다 빠르게 해석할 수 있음을 보여준다. 또한, COG 높이의 증가는 차량의 SSF에 영향을 미치므로 전복 안정성이 감소하는 것으로 관찰되었다. 농작업기의 부착에 따라 트랙터의 무게중심과 중량이 달라지며 이를 적용한 다양한 작업기에 대한 모델 해석이 필요하다. 향후에는 다양한 농작업기의 부착 형태와 지형에 따라서 이동할 때 트랙터의 시뮬레이션 모델을 사용하여 동적 안정성을 연구할 수 있을 것이다. 트랙터 휠 트랙 폭과 COG 높이의 영향이 안정성 지수에 대한 트랙터 휠 베이스의 영향보다 더 컸다. 따라서 트랙터가 전복되지 않도록 안정시키기 위해서는 트랙터의 COG를 낮추고 트랙터의 휠 트랙 폭의 증가가 유의한 것으로 나타났다.

