Introduction
트랙터는 플라우, 로타리, 베일러 등 다양한 농작업기를 부착하여 각종 농작업의 동력원으로 사용되는 차량이다 (Kim et al., 2019). 기존의 트랙터의 성능 평가는 다양한 작업환경 및 조건에서의 필드 시험을 통해 수행되었다 (Kim et al., 2016). 하지만, 필드 시험은 많은 시간과 비용이 요구되며, 토양 조건 및 작업자 등과 같은 시험 조건에 따라 각기 다른 결과를 나타낼 수 있다. 따라서 필드 시험의 대체가 가능하며 신뢰성 있는 성능 평가를 위한 대안이 필요한 실정이다. 자동차 분야에서는 다이나모미터를 이용하여 표준화된 주행 사이클 기반의 실내 성능 평가를 수행하고 있다. 주행 사이클은 일반적으로 자동차가 주행하는 환경인 국도, 고속도로 등 실제 주행 데이터를 기반으로 개발되며, 이는 표준 테스트 코드로써 연비, 내구성, 변속 품질 및 배기가스 등과 같은 자동차 분야의 전반적인 성능 평가 시 활용된다 (Hung et al., 2007). 특히, FTP, ECE와 같은 국제 표준이 널리 사용되고 있다 (Lyons et al., 1986). 자동차 분야의 대표적인 주행 사이클은 대표 경로를 선정하고, 필드 데이터를 수집하여 최소 작업 단위인 Micro-trip 기반 주행 사이클 생성 및 평가의 프로세스를 통해 개발된다 (Tong and Hung, 2010). Ho et al. (2014)은 연료 소비 및 배출량을 평가하기 위해 싱가포르의 주행 사이클을 개발했으며 유럽의 주행사이클인 NEDC와 비교할 때 성능이 더 우수하다고 보고하였다. 이와 같이 자동차분야에서는 주요 국가별로 표준화된 주행 모드를 개발하여 제품 개발 및 성능 평가 시 활용되고 있다. 그러나 트랙터는 자동차와 달리 불규칙한 토양 조건에서 농작업을 수행하므로 토양 조건, 작업기 등 다양한 조건에 따라 변동하는 부하 조건을 갖고 있기 때문에 이에 대한 표준화가 어려워 아직까지 부하 모드 개발에 관한 연구는 부족한 실정이다. 따라서, 농업용 트랙터 분야에서도 실제 농작업 데이터를 이용한 표준화된 농작업 부하모드의 개발이 필요한 실정이다.
본 연구의 목적은 포장 시험의 대체가 가능한 주요 농작업별 트랙터 작업 부하 모드를 개발하는 것으로써, 주요 목적은 1) 필드시험을 통한 트랙터 주요 농작업별 부하 데이터 수집, 2) Micro-trip 기반의 부하 사이클 생성, 3) 모드 개발론 기반 작업별 트랙터 부하모드 개발, 4) 주행 사이클의 PV 값을 이용한 개발된 부하 모드의 성능 평가를 수행하는 것이다.
Materials and Methods
농업용 트랙터 및 토크 계측 시스템
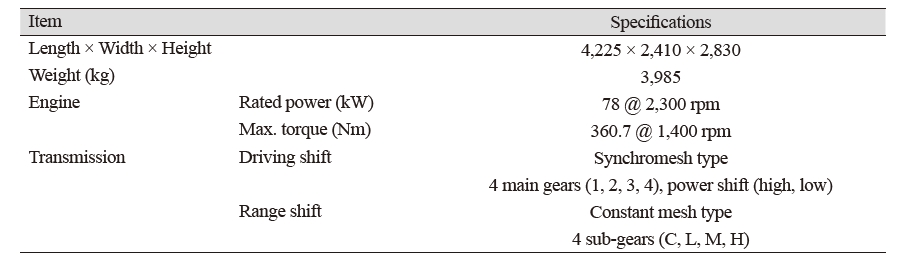
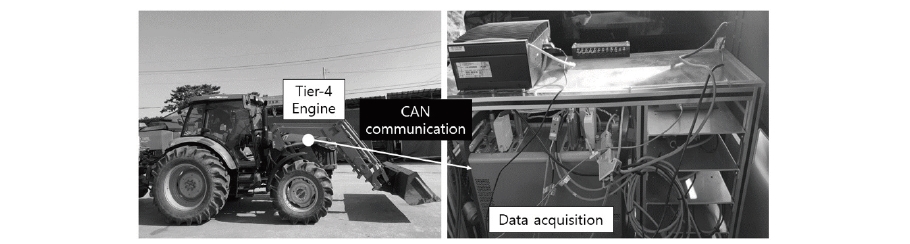
본 연구에서는 국내 78 kW급 트랙터(S07, TYM, Korea)를 사용하였으며, 외경은 4,225(L) × 2,140(W) × 2,830(H) mm, 총 중량은 3,985 kg이다. 엔진 최대 토크는 1,400 rpm에서 360.7 Nm를 가지며 자세한 제원은 Table 1과 같다. 본 연구에 사용된 트랙터는 전자 엔진을 탑재하고 있기 때문에 Fig 1과 같이 엔진 토크 데이터를 CAN 통신을 이용하여 측정할 수 있다. 엔진으로부터 측정되는 실시간 작업 토크 데이터는 데이터 수집장치(CRONOS compact CRC-400-11, IMC, Germany)에 저장되도록 시스템을 구축하였다.
주요 농작업 부하 데이터 수집을 위한 필드 실험
필드 시험지는 충청남도 청양군 (위도 36°37´50˝, 경도 127°4´35˝)에 위치한 크기 4,000 m2 (100 x 40 m)의 논 필드를 사용하였다. 필드시험지의 토성은 필드 시험지 내 균일한 위치에서 시료를 채취하여 USDA (United States Department of Agriculture)의 토양 분류법을 이용하여 분석을 수행하였고, 토양 수분함량과 토양 강도는 필드 시험지 내 임의의 열 곳의 위치에서 각각 Soil moisture sensor (TDR350, Spectrum Technology, E Plainfield, USA)와 Soil compaction meter (SC900, Spectrum Technology, E Plainfield, USA)를 이용하여 측정한 뒤 평균값을 사용하였다. 본 연구에서 수행한 필드시험지의 토양 환경 분석 결과는 Table 2와 같다. 본 연구에서는 트랙터의 주요 농작업으로써 Fig. 2와 같이 플라우 경운 및 로타리 경운을 선정하였다(Kim et al., 2011). 트랙터 부착 작업기는 국내 78 kW급 농업용 트랙터에서 사용되는 경폭 280 cm의 플라우(WJSP-8, Woongjin Machinery Co., Ltd., Korea), 경폭 250 cm의 로타리(E260, Celli Co., Ltd., Italia)를 대상으로 선정하였다. 농작업 시 트랙터 단수는 사용자 설문조사를 통하여 플라우 경운 작업 시 m3 Low (7.06 km/h), 로타리 경운 작업 시 L3 High (2.83 km/h) PTO 1단(540 rpm)로 설정하였다. 경운 작업은 작업 경심에 따라 트랙터의 작업 부하가 크게 차이가 나기 때문에, 작업 경심은 국내 논 토양조건에서 수요자가 대부분 사용하는 15~20 cm의 수준을 유지하도록 하였다. 트랙터 부하 데이터는 작업자의 숙련도에 따라 크게 다르게 나타나기 때문에, 본 연구에서는 데이터의 신뢰성 확보를 위하여 실제 농민 및 국내 트랙터 제조업체의 숙련된 작업자가 직접 작업을 수행하였다. 이때, 작업 패턴은 국내 사용자 선호도가 가장 높은 C-type을 사용하였다 (Park, 2019).


트랙터 농작업 부하모드 개발
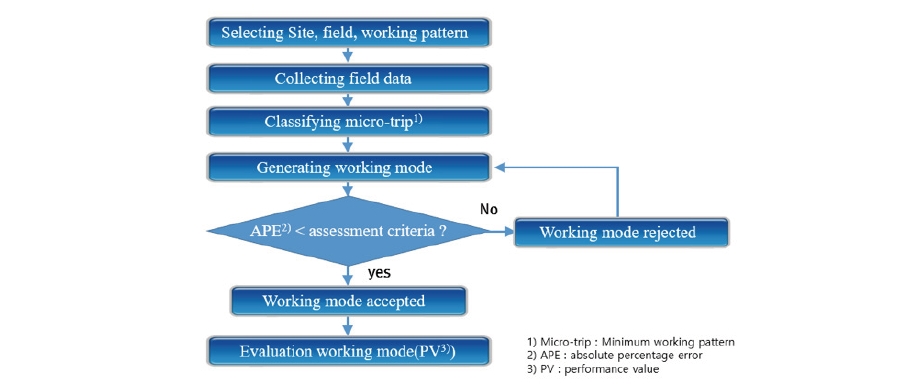
농작업 부하모드는 자동차 분야의 주행 사이클 개발 이론을 기반으로 Fig. 3과 같이 주요 농작업, 지역, 경로 등을 선정하고, 필드 시험을 통해 데이터를 수집하여 Micro-trip 분류 및 판정 기준에 따라 개발되었다. 자동차 분야의 주행사이클은 주행이 목적이기 때문에 주요 판정 지표로써 속도 및 가속도를 사용하였다. 하지만, 트랙터는 농작업이 주 목적으로, 토크 변화가 가장 크게 나타나기 때문에 속도가 아닌 토크 및 토크 변화량을 주요 변수로 사용하였다. 농작업에 따라 측정된 엔진 토크 데이터는 최소 농작업 단위인 Micro-trip으로 분류 되었다. 이때, Micro-trip은 정지상태에서 다음 정지상태 사이의 실 작업 구간이며, 주요 농작업마다 작업 패턴 및 특성에 따라 다르게 정의된다. 부하모드 판정 기준은 엔진 토크 및 토크 변화량의 최대, 최소, 평균 값과 평균 Micro-trip 구간의 시간으로 선정하였다. 부하 사이클은 식 (1)과 같이 임의의 Micro-trip을 조합하여 생성되었다. 생성된 부하 사이클은 전체 데이터 set과 총 7개의 판정 기준에 따라 비교하여 식 (2)와 같이 절대상대오차(Absolute percentage error, APE)가 5% 미만일 경우 최종 부하모드로 판정하였으며, 하나의 판정 기준이라도 5% 이상의 APE 값을 보일 경우 임의의 Micro-trip을 생성하는 단계로 돌아가서 조합을 다시 선정하였다.
 (1)
(1)
 (2)
(2)
 (3)
(3)
Results and Discussion
플라우 부하모드 개발
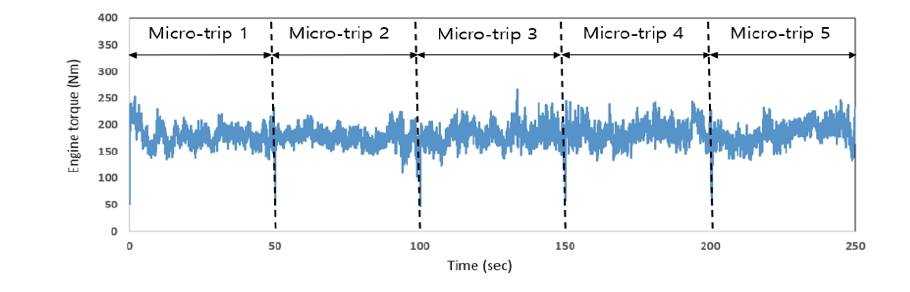
플라우 작업에 따라 측정된 엔진 부하데이터를 기반으로 Fig. 4와 같이 플라우 작업 부하모드를 개발하였다. 개발된 부하모드는 5개의 Micro-trip으로 구성되어 있으며, 개발된 부하모드는 약 250초의 작업시간을 보였다. 플라우 부하모드는 약 150~250 Nm의 엔진 토크 범위를 보이는 것으로 나타났으며, 판정 기준에 대한 분석은 Table 3과 같이 나타났다. 플라우 부하모드의 판정 기준에 대한 절대상대오차는 1.09~4.65%의 범위로 나타났으며, 모든 판정 기준에서 5% 미만을 만족하고 있는 것으로 나타났다.
|
Table 3. Results of absolute percentage error analysis about assessment parameters between entire data set and developed plow tillage working mode 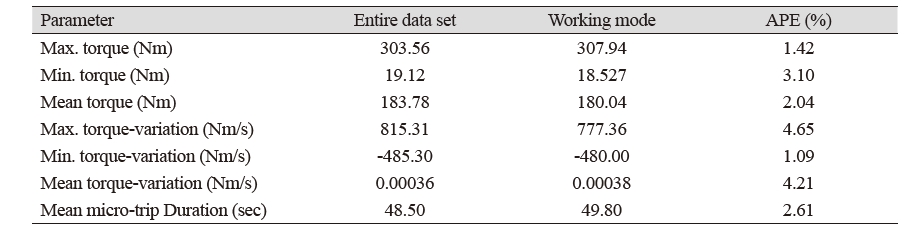
|
로타리 부하모드 개발
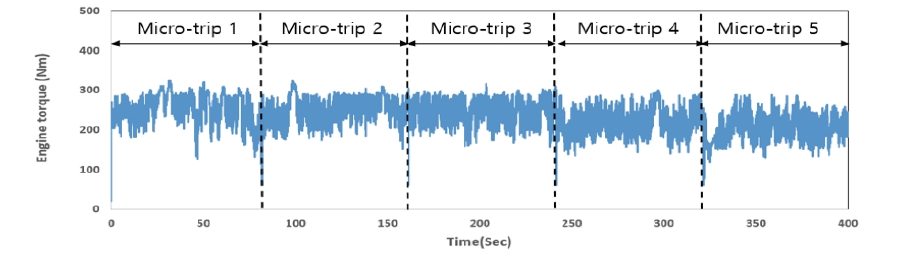
로타리 작업에 따라 측정된 엔진 부하데이터를 기반으로 Fig. 5와 같이 로타리작업 부하모드를 개발하였다. 개발된 부하모드는 플라우 부하모드와 마찬가지로 5개의 Micro-trip으로 구성되어 있으며, 개발된 부하모드는 약 400초의 작업시간을 보였다. 로타리 부하모드는 약 200~300 Nm의 엔진 토크 범위를 보이는 것으로 나타나 플라우 작업 대비 약 1.2배 높게 나타난 것을 알 수 있으며, 판정 기준 분석 결과는 Table 4와 같이 나타났다. 로타리 부하모드의 판정 기준에 대한 절대상대오차는 0.81~4.64%로 나타났으며, 모든 판정 기준에서 5% 미만을 만족하고 있는 것으로 나타났다.
|
Table 4. Results of absolute percentage error analysis about assessment parameters between entire data set and developed rotary tillage working mode 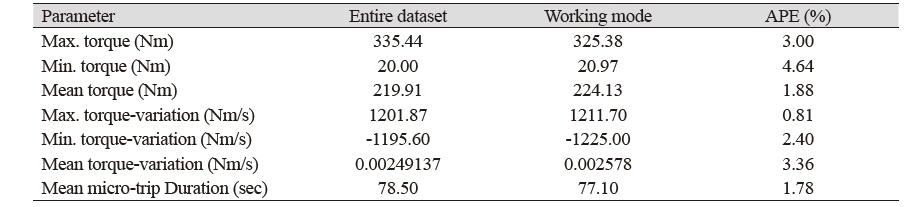
|
부하모드 성능 평가
개발된 플라우, 로타리 부하모드의 PV는 각각의 판정 기준의 절대 오차 값을 이용하여 분석한 결과 각각 98.05, 78.56로 나타났다. 로타리 부하모드는 플라우 부하모드 대비 PV의 값이 낮아 더 높은 대표성을 보이는 것으로 나타났다.
개발된 플라우 및 로타리 부하모드의 성능은 Hung et al (2007)의 연구에서 제시된 국제 공인 주행 사이클의 PV 값을 이용하여 평가하였으며, 그 결과 Table 5와 같이 국제 공인 주행 사이클의 PV 값을 개발된 부하모드의 PV 값으로 나누어 비율로써 나타냈다. 플라우 부하모드는 국제 공인사이클 대비 59~99%의 성능을 보였으며, 로타리 부하모드는 74~124%의 성능을 보였다. 특히, 로타리 부하모드는 ECE15, 10 Mode 보다 더 높은 성능을 보이는 것으로 나타났다.

Conclusion
본 연구는 농업용 트랙터의 플라우 경운 및 로타리 경운 작업에 따른 표준화된 부하모드를 개발하기 위하여 주요 작업별 부하 데이터를 수집하고 모드 개발 방법을 이용하여 부하모드를 개발했다. 개발된 부하 모드의 성능은 자동차 분야의 PV 값과 비교함으로써 평가하였으며, 주요 결과는 다음과 같다.
플라우 부하모드와 로타리 부하모드의 절대상대오차는 모든 판정 기준에서 각각 1.09~4.65%, 0.81~4.64%의 범위를 보여, 5% 미만의 오차를 나타냈다.개발된 플라우 및 로타리 부하모드의 PV 값은 각각 98.05, 78.56로 나타나, 로타리 부하모드가 플라우 부하모드 대비 더 높은 대표성을 보이는 것으로 나타났다. 개발된 부하모드의 성능은 선행연구에서 제시된 국제 공인사이클과 비교를 통하여 분석되었으며, 플라우 부하모드 및 로타리 부하모드는 국제 공인사이클 대비 각각 59~99%, 74~124%로 나타났다. 플라우 부하모드의 성능은 ECE15의 99% 수준으로 나타났으며, 특히, 로타리 부하모드는 ECE15, 10 Mode, IM240 보다 더 높은 성능을 보이는 것으로 나타나, 개발된 부하모드의 적용 가능성을 확인하였다. 본 연구에서는 한정적인 작업 조건(토양 환경, 작업 단수, 작업기)에서 수집된 데이터를 이용하여 부하모드를 개발하였다. 따라서, 국내 트랙터 농작업을 대표하는 부하모드를 개발하기 위해서는 기존에 수행된 연구에 토양 환경, 작업 단수, 작업기, 작업자, 작업 패턴 등 다양한 작업 조건에 대한 부하 데이터베이스를 구축하여 적용하는 것이 필요하다. 향후 연구에서는 다양한 조건별 부하 데이터베이스를 구축하고, 국내 트랙터 농작업을 대표할 수 있는 부하모드 개발에 관한 연구를 수행할 예정이다.

