Abstract
The objective of this study was to review the research activity and developments on transplanting mechanisms for onion cultivation. The literature was reviewed for handheld, semi-automatic and automatic onion transplanting devices and their respective mechanisms used for onion transplantation. Handheld onion transplanter devices used a simple structure mechanism consisting of two jaws pivoted at the bottom of the seedling guide tube and can be open and close by pressing the hand lever. Finger type and plug type transplanting mechanism commonly used in semi-automatic onion transplanter. Semi-automatic onion transplanters are either walk behind or tractor driven and an operator need to concentrate on manual feeding of seedlings into the planting hoppers. Fully automatic onion transplanters consist of seedling picking and planting mechanisms. These automatic transplanting mechanisms involve a continuous process of seedling extraction from the growing medium cell tray and punching into the soil at required depth and planting interval respectively. Pin type and pushing bar type pickup mechanisms have developed to extract the onion seedlings automatically and place at pre-defined position. These mechanisms are comprise by grippers, manipulators, and end effectors. In recent studies, 4 bar and 5 bar seedlings pickup mechanisms were investigated to evaluate the motion trajectories and best possible combinations of the link bars. The wheel type, rotary type, and linkage type planting mechanisms have been developed to deposit the onion seedlings into the soil. Transplanting rate, efficiency, and accuracy of the automatic onion transplanting mechanism is significantly better than the handheld and semi-automatic onion transplanters.
Figures & Tables
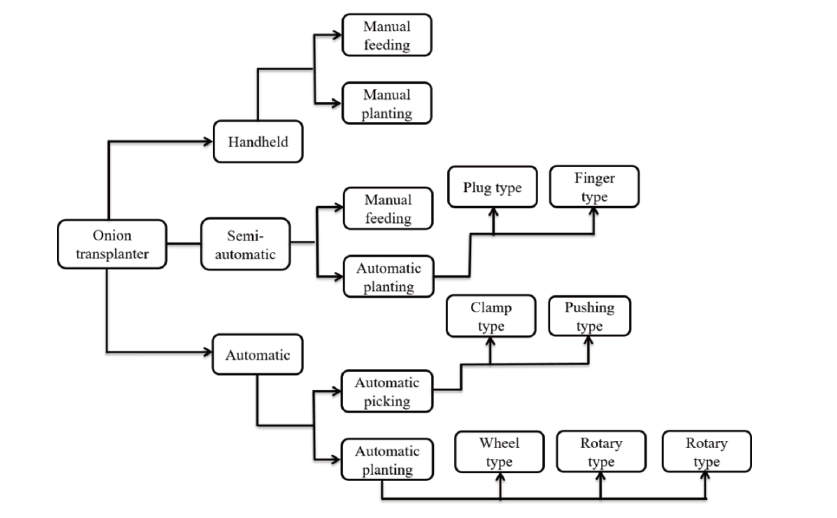
Fig. 1.Classification of onion transplanting mechanism.

