Abstract
Research of robotization and automation for agricultural machinery has been conducted due to the continuous reduction of the population for agricultural operation. In the case of a robot tractor, work stability is determined according to the performance of steering controller for the steering. However, the test using vehicles is costly and time consuming. Accordingly, in recent studies, studies using a dynamics simulation software have been conducted. In this study, a dynamics model was developed, and performance evaluation of the steering controller model was performed. The controller model was constructed to receive the lateral error of the dynamics model. The dynamics model was driven in a straight line by the controller model. The controller model consisted of a PI controller. The steering controller model performance evaluation was conducted for lateral error, yaw angle error, and steering angle. Performance evaluation of the steering controller model was conducted using a dynamics model. The dynamics model was constructed using Recurdyn (V9R2, Functionbay, Korea). The input value of the simulation model was set as the axle torque of a tractor during rotary tillage operation. As a result of performance evaluation of the controller model, the average lateral error was 2.53 mm, the average yaw error was -0.10°, and the average steering angle error was 1.12°.
Figures & Tables
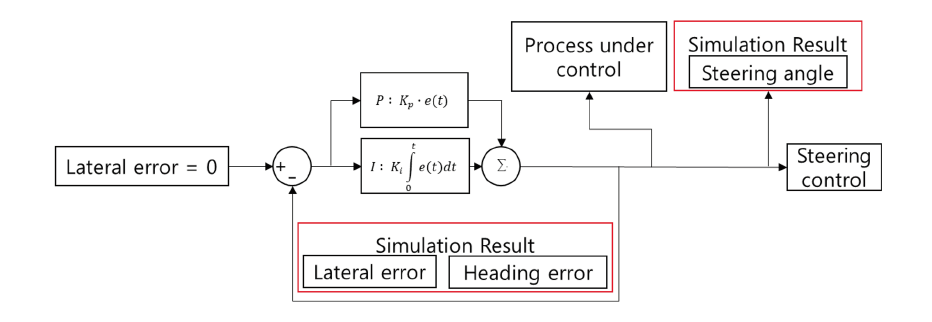
Fig. 1. Flow chart of steering controller model (Proportional integral control model) for dynamics simulation model to control lateral error

