Introduction
The onion (Allium cepa L.) also known as the bulb onion is the most widely cultivated and consumed vegetables across the globe. The onion cultivation area in the world was 2.4 million ha in 1996 and it reached 4.9 million ha in 2016 and the changes in onion production was recorded 60 million tons in 1996 to 90 million tons in 2016 (Hanci, 2018). China is the largest onion producer in the world with annual production is around 24 million tons. India produced 19 million tons of onion and comes second in the yearly production. The demand of this vegetable is very high worldwide. Normally the onion seedling are raised in the cell tray for the transplantation. Planting onion in a traditional way is very drudgery and non-efficient and require 185-260 man-hr/ha (Kumar and Raheman, 2008). Onion is one of the crops with a lower mechanical work rate and higher labor input compared to rice or other crops. In addition, the aging of rural workers has led to a decline in labor qualitative skill levels, while labor costs for onion production are rising due to a lack of manpower. The manual transplanting of the vegetable seedling is a cumbersome and laborious task for the famers when need to do on a large commercial scale. More time and money need to spend with non-uniform outcomes of transplanting than the mechanized transplantation (Orzolek, 1996). The continuous increase in labor costs for onion production leads to an increase in the price of onions in South Korea, resulting in lower price competitiveness compared to foreign onions. In onion cultivation, the largest percentage of labor input is planting and harvesting, requiring a large amount of labor of 26% each. Therefore, it is necessary to develop an automatic onion planting machine to reduce the amount of labor input.
The transplanters are classified as semi-automatic and automatic (Park et al., 2004a). The automatic transplanter are able to feed the seedling into the hopper of the planting device by mechanically designed self-propelled mechanisms whereas in semi-automatic transplanters farmer manually supply the seedling to the planting device. Research and development of plug seedling transplanter were started in 1980s. It was reported by Srivastava (2000) that mechanized cultivation of the vegetables can be effective to increase the production as well as quality of the crop. In vegetable cultivation, mechanical transplanters are effective to reduce the labor cost and increase the quality of the product by standardizing the row spacing, planting internal, planting depth and on time transplantation of the seedlings. Min et al. (2014) stated that implantation of the seedling is simply dropping the seedling in to the soil by a component of the transplanter called planting device. A 4-row onion automatic planting machine (OPK-4-KR) developed by Kubota, South Korea, and a paper pot onion planting machine developed in India. (Kumar and Raheman, 2011). Overall transplanting efficiency depends on the mechanism type of the planting device used for the transplanter. These limitations in the transplanting efficiency occurred due to the non-vertical deposition of the seedling into the soil and creation of wide transplanting hole diameter by some vegetable transplanter (Jo et al., 2018). The planting mechanisms operate on a structure of linkages, which moves the planting hopper in a trajectory pattern that can be set to a constant rate of motion. However, a few modifications to the linkages responsible for the trajectory may significantly improve the working ability and efficiency of the transplanter by solving the problem of defective transplanting orientation.
The objective of this study was to review and classify the transplanting mechanisms utilized in different kind of onion transplanters. The working principles and operational efficiencies of handheld low cost manually operated onion transplanting mechanism, semi-automatic plug type onion transplanting mechanism and automatic onion seedling picking and planting mechanism are discussed in this review article.
Classification of the onion transplanting mechanism
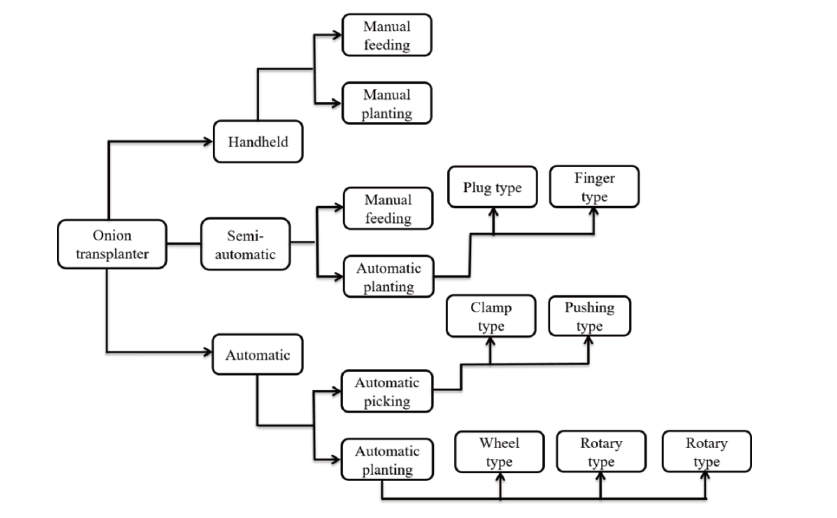
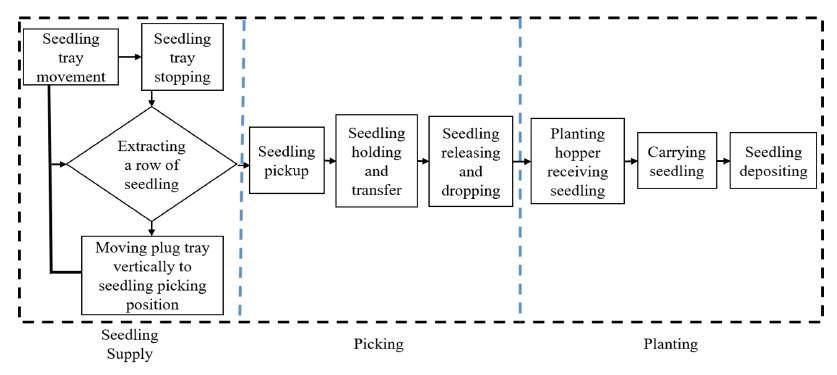
Fig. 1 shows the classification of onion transplanting mechanism based on the operational methods and mechanisms used in onion transplanters. The handheld, semi-automatic and automatic onion transplanting devices have been commercially available since last two decades. The handheld and the semi-automatic onion transplanting devices are cumbersome to utilize because, the manual feeding of the seedlings in to the hopper depends on operation interval and expertise of the operator. The machine vision was applied to extract the area of seedling perimeter, and a 98% success rate were obtained for automatic seedling transplantation. (Jiang et al., 2009; Sun et al., 2010; Han et al., 2013; Tong et al., 2014).
The end effectors for seedling transplanter classified based on picking actions of the fingers, the clamp type Zhou et al. (2009) and slide type (2015). The vertical position of clamp type end effector changes after clamping the seedling whereas, the slide type end-effector don’t change its vertical position during the seedling transportation. The pin type end effectors have difficulty in releasing the seedling and slide type end effectors have grasping problems during the seeding transplanting process. Jiang et al. (2017) designed an end effector with four needles could be driven by linear pneumatic cylinder. Therefore, the workability of grasping and penetration of the needles into the substrate of the seedling pot could make possible simultaneously. 100% results were obtained for total transplanting success rate whereas, less than 17% of seedling root damage rate were observed with slightly cracked or 1/5 of substrate damage of root plugs. The designed model is convenient to adjust the verticality and penetration depth for different vegetables and seedling tray.
Handheld onion transplanting
Jin (2013) invented a low cost handheld transplanter for onion seedling implantation into the soil. This device consisted of hole punching mechanism at the lower end of the transplanter consisting on a pair of jaws which was able to penetrate through the plastic mulch film and create a taper hole for onion seedling placement.
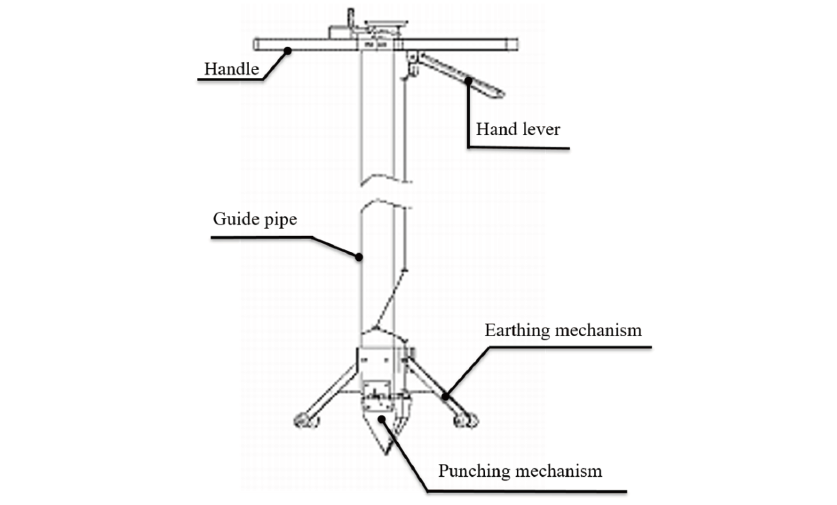
Moreover, a seedling guide mechanism moved downward to open the punching hopper and guide the seedling inside the punched hole. To satisfy the vertical deposition state of the seedling an earthling mechanism used to cover the seedling surroundings with soil. The required planting depth (2 cm) of the onion seedling was completely depending on the operator and it was found random and result showed the errors. Nandede et al. (2017) developed a low cost two row vegetable transplanter also suitable for the transplanting of onion plug seedling. The transplanting mechanism involve a simple jaws combined with springs and hexagonal bolts, pivoted at the bottom of the seedling guide pipe. Table 1 shows the field performance comparison of the handheld and manual transplanting of onion seedlings with or out without mulching. Field performance results such as planting interval, planting efficiency, field capacity and transplanting rate were mentioned..
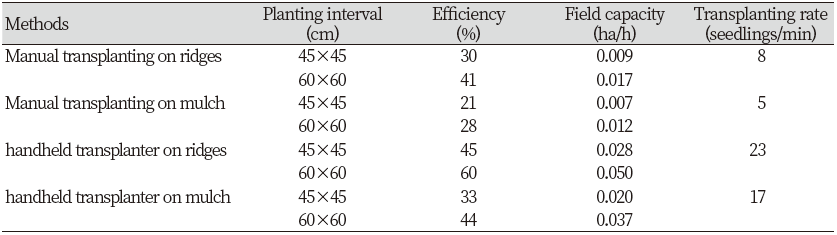
Single person required to punch the transplanter into the soil and pull the lever in upward direction, which is attached with jaws mechanism by using a gauge wire to open the jaws inside the soil. An adjustable marker was attached by a holder to locate the next planting position. Experiment was done for inter and intra row spacing on ridges and plastic much bed respectively. The transplanting rate of 23 and 17 seedlings/min were obtained for raised bed and plastic mulch bed respectively.
Semi-automatic onion transplanting device
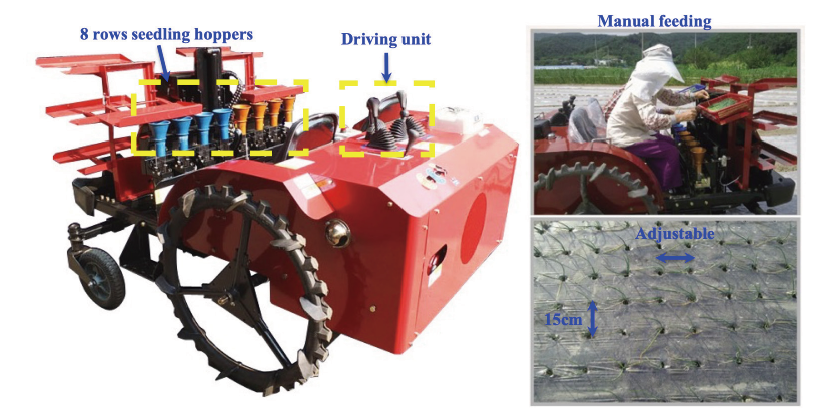
The semi-automated transplanter are not suitable for continuous operation for a long period of time due to the limited operation speed as only one seedling is possible to feed manually at a time. In the case of the semi-automatic onion planting machine developed by Joeun Agricultural Machinery, a person boards and manually transfers the seedlings as the seedling transfer method. An 8-row semi-automatic onion transplanter (A5-1200) was developed by (Joeun Agricultural Machinery, South Korea). Fig. 3 shows the riding type self-driven semi-automatic 8-row onion transplanter. The row to row distance for above mentioned onion transplanter is 15cm. whereas, plant to plant distance is adjustable. In semi-automatic mechanism, there is a possibility of miss feeding of the seedlings when the transplanting rate is higher (Khadatkar, 2018). The walk behind type and riding type semi-automatic onion transplanters are commercially available.
The semiautomatic tractor driven onion transplanter generally comprised by a furrow opener, a seedling transferring or conveying mechanism, a soil covering device, and a seedling delivery tube. It was judged that transplanting efficiency was directly proportional to the speed of the operation. The 72.39% maximum transplanting efficiency was measured at 3.5 km/hr operational working speed (Kumawat et al., 2020). A tractor driven semiautomatic transplanter was developed and evaluated for different vegetables including onion and transplanting rate 60-80 seedlings/min was observed with row spacing of 30cm (Cráciun and Balan, 2005).
Automatic onion transplanting mechanism
Automatic onion transplanting devices involve repeat process of seedling picking from the tray and planting it into the soil and reduce the labour requirement for feeding the seedlings. Fig. 4 shows the schematic view of automatic seedling transplanting mechanism. Automatic onion transplanting devices is a synchronized combination of automatic seedling pickup and planting mechanism.
The self-propelled fully automated transplanting mechanism for onion seedlings permit the high speed planting operation and effective for the elimination of laborious tasks because seedling fed and planted automatically by machine itself (Zhou et al., 2014). In general, the automatic onion transplanting devices may be walk behind or riding type. Furthermore, the walk behind type onion transplanter are self-propelled whereas the riding type are either self-propelled riding type or self-propelled tractor-driven.
Automatic picking mechanisms
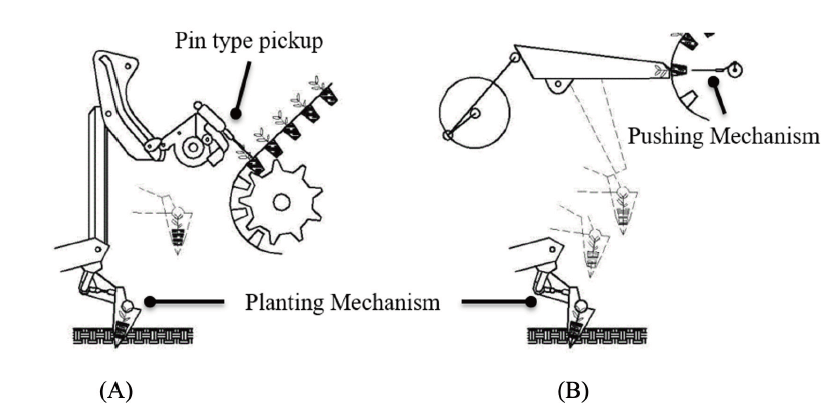
Pin type and pushing type automatic seedling pickup mechanism are used for the onion seedling extraction (Min et al., 2014). Fig.5 shows the two different kind of plug seedling extraction methods which is picking and pushing the plug seedling from the cell tray. The both pin type seedling picking and pushing type seedling extraction method used and suitable to meet the required conditions for onion seedling transplantation. The Kubota onion planter OP4-KR selected pin type method to withdraw the onion seedling from the cell tray and deliver it to the conveyor belt which is further synchronized with the rotary planting hopper. The (Minoru, Japan) onion planter OPT-4 used pushing type method to pull out the onion seedling from the cell tray and one seedlings carrying assembly transferred the seedling on the conveyor belt where seedling falls into rotary hopper to deposit into the soil.
Pin type seedling extraction mechanism
Choi (2000) presented an automatic seedling pickup mechanism for plug seedlings showed in Fig. 6. This kind of seedling pickup mechanism suitable for effective, accurate and efficient planting with less human intervention. General concept of this kind of picking mechanism is to extract single seedling from the plug tray using pair of pins, then discharge at the required place and come back its initial position.
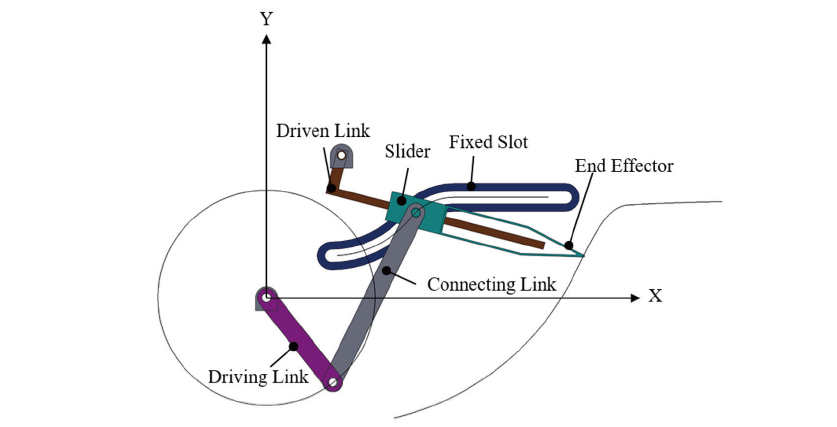
The onion seedling planting machines used in Japan and Korea have a small cell tray diameter of 18 mm or less. Rahul et al. (2019) designed and developed a parallel robotic arm consisting of five revolute joint (5R) and two degree of freedom. The developed mechanism was synchronized with mechanical, electronic, logic and program consideration to integrate the automatic handling of the paper pot seedling for field operation. It was reported that a parallel robot arm was suggested to be more suitable for high speed operation of picking and placing of the paper pot seedlings under a hostile environment. Forward kinematic equations were synthesized to calculate the suitable lengths of linkage and the grippers for a specified working area and depending on the known parameters, the input actuator link of appropriate combination was selected. The average estimated time to complete one cycle of picking and placing of the seedling was 2.25 sec. Due to the implementation of linear trajectory with parabolic blend a smooth positional repeatability, 2.1 and 3.4 mm in X and Y directions was obtained without any jerk during the pick and drop cycle.
Pushing type seedling extraction mechanism
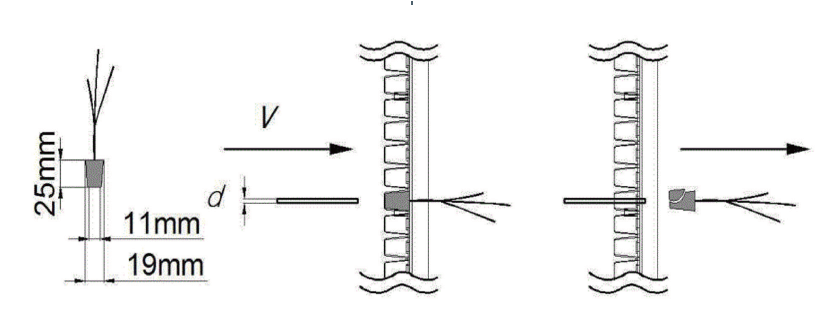
Min et al. (2014) investigated the performance of the onion transplanting mechanism consisting of pushing type onion seedling extraction mechanism. A seedling pushing type mechanism developed to measure the extraction resistant of onion seedlings. The ejection pin used in this study was consisted of pneumatic cylinder of 50 mm, a pin for pushing seedlings of 80 mm, and pushing pin diameter varies from 4 mm to 8 mm. The seedling take-out resistance found to be increasing as the diameter of the pushing pin increase. In addition, the extraction resistance and breakage rate of seedlings were analysed according to the change in pin diameter and speed.
An automatic onion transplanting method described by Min et al. (1999) which consist of seedling-mounting, one step downward movement then seedling-extraction and finally transferring the seedling into the hopper through free falling process. It was suggested that weight of the root of the onion seedling is an important for safe transferring during the free fall process.
Automatic planting mechanisms
The planting device of the vegetable planter developed and distributed in Korea includes a wheel method, a rotary method, a 4-section link method, and a 4-section link-cam method. A study was done by Min et al. (2015) involving the structural and motion trace path trajectory analysis of four different vegetable transplanting mechanism for the development of onion transplanter. These four mechanism were consisted of wheel type, rotary type, four bar link, and four bar link-cam type transplanting mechanisms. Forward drag distance of the planting hopper was measured for each mechanism at zero relative velocity. It was stated that four bar link-cam type mechanism produced the smallest drag distance of 9.89 mm when the row spacing was 130 mm. Therefore, four bar link-cam type transplanting mechanism could meet the required needs and expected to maximize the transplanting performance.
Wheel type transplanting mechanism
The wheel method is a method in which a number of planting openers are installed on the wheel to formally match the wheel speed. And it is characterized by a uniform structure and simple structure even when the speed changes. However, the wheel-type planting device has a disadvantage in that it is bulky and a plurality of planting openers must be mounted. For wheel method, the planting opener would not be attracted because the end of the planting opener was fixed in the soil (Kim et al., 2004).
Rotary hopper type transplanting mechanism
The rotary method is the planting device that is most often used for planting vegetables by drawing power through the crankshaft and drawing the oval-shaped stop trajectory of the planting machine while the gear cases and planting machine rotate. As for the rotary method.
Linkage-cam type transplanting mechanism
An onion transplanter consisting of a 4-bar cam type seedling planting mechanism was manufactured by Min et al. (2016) with almost zero relative motion between hopper and forward speed of the device. Optimum operating condition was evaluated and 100% success planting rate were obtained with plating efficiency of 50 seedling/min. Jo (2018) developed a study that how to enhance the transplanting efficiency by positions analysis and selection of the appropriate lengths of the linkage mechanism of planting device shown in figure. Validation comparison and analyzation were done between the actual and simulated trajectories extracted by using the CCD (charged couple device) camera and Recurdyn 3D software respectively. Performance evaluation experiment were conducted for both existing and improved planting devices. Average planting angle, soil encroachment diameter and planting depth was improved by 4.96 mm, 11.30 mm, and 0.68 mm respectively.
Shao et al. (2019) developed a multifunctional vegetable transplanting machine with two kind of duckbill planter were designed, diamond duckbill type and flat duckbill. The mechanism was composed of two crank arms and three connecting rods. The both crank arms rotate counter clockwise with similar rotational speed around the fixed point respectively, as the result the seedling were picked by the duckbill planter at predetermined position and move downward to plant the seedling into the soil. Simulation were carried out at low, medium, and high speed of motion with corresponding values were set to be 0.5 km/h, 1.0 km/h and 1.5 km/h respectively. The planting frequency were determined 57, 72 and 88 seedlings/min respectively.

The study trends and findings in the field of onion transplanting mechanism briefly discussed in this review study. This study elaborates the mechanisms used for onion transplantation over the past few decades. The low cost handheld onion transplanting device are mostly used in under developed south Asian, central Asian and African countries. Single person can operate this device with field efficiency and field capacity of 45-60% and 0.028-0.050 respectively. However, operator also requires a rest pause of 4.5 minutes approximately during the transplanting operation. By using handheld device 34% time saving was measured as compare to manual transplanting. The semi-automatic onion transplanters were developed and largely used in USA, China, Japan, Korea, and India. These transplanters are mainly classified as self-driven and tractor driven type. But for each type person has to board and manually feed the seedling to the planting hopper or conveying mechanism. Maximum transplanting efficiency and working speed was calculated as 72.39% and 3.5 km/hr respectively. Whereas transplanting rate of 70-80 seedlings/min can achieved using semi-automatic onion transplanter. Fully automatic onion transplanting mechanisms possess the most convincing impact on the farmers and wide research is going on to improvise the performance. Most advanced form of these transplanter is self-propelled riding type, consisting of mechanically extrusion of seedling from growing tray and implanting into the soil.
Summary and Conclusions
Number of onion transplanter based on different operation mechanisms have been commercially available since last two decades. Performance, transplanting efficiency, and accuracy of individual components as well as overall system has been significantly improved. This review study provides the following useful information related to the mechanism used in the onion transplantation.
1) Handheld onion transplanting device is a low cost manually operated mechanism suitable for small land holder farmers. This transplanting mechanism involve a simple jaws pivoted at the bottom of the seedling guide mechanism and device holder and jaws operation lever is attached at the top end of guide mechanism. Single person required to punch the transplanter into the soil and pull the lever in upward direction, which is attached with jaws mechanism by using a gauge wire to open the jaws inside the soil. Next planting position is also possible to locate using an adjustable marker. Based on the literature, the handheld onion transplanting device is capable to transplant the 23 and 17 seedlings/min for raised bed and plastic mulch bed respectively.
2) The semi-automatic onion transplanting devices are cumbersome to utilize because, the manual feeding of the seedlings in to the hopper depends on operation interval and expertise of the operator. Semi-automatic walk behind type and tractor operated type onion transplanter are commercially available worldwide. It requires manual feeding of the plug seedling by a person who need to board on the transplanter. The semi-automatic onion transplanter used plug type, finger type, and cup or bucket type metering mechanism for the onion seedling deposition into the soil. These type of transplanting device are prone to miss feeding of seedling at higher transplanting rate.
3) The automatic onion transplanting devices are able to feed a row the seedlings to the conveyor mechanism where it further fed into the hopper of the planting device by mechanically. 4 rows, 6 rows and 8 rows automatic onion transplanting devices are available commercially. Depending on the number of rows and operational capacity these transplanters are either walk behind type self-propelled or riding type self-propelled, and riding type tractor operated. Pin type and pushing type seedling picking mechanism are used to extract a row of onion seedlings from the plug tray and end-effector assembly used to transfer the seedlings on conveyor mechanism. Wheel type, rotary type and linkage type planting mechanism are commonly used to deposit the onion seedlings into the soil. Performance evaluation of the automatic onion transplanting mechanism is significantly better than the handheld and semi-automatic onion transplanters.

